
Warning
You are reading a version of the website built against the unstable main branch. This content is liable to change without notice and may be inappropriate for your use case.
You can find the documentation for the current stable release here.
Adaptive Multigrid Methods using AdaptiveMeshHierarchy¶
Contributed by Anurag Rao.
The purpose of this demo is to show how to use Firedrake’s multigrid solver on a hierarchy of adaptively refined Netgen meshes.
We will first have a look at how to use the AdaptiveMeshHierarchy to construct the mesh hierarchy with Netgen meshes, then we will consider a solution to the Poisson problem on an L-shaped domain.
Finally, we will show how to use the AdaptiveMeshHierarchy and AdaptiveTransferManager to construct a scalable solver. The AdaptiveMeshHierarchy contains information of the mesh hierarchy and the parent child relations between the meshes.
The AdaptiveTransferManager deals with the transfer operator logic across any given levels in the hierarchy.
We begin by importing the necessary libraries
from firedrake import *
from netgen.occ import *
import numpy
Constructing the Mesh Hierarchy¶
We first must construct the domain over which we will solve the problem. For a more comprehensive demo on how to use Open Cascade Technology (OCC) and Constructive Solid Geometry (CSG), see Netgen integration in Firedrake. We begin with the L-shaped domain, which we build as the union of two rectangles:
rect1 = WorkPlane(Axes((0,0,0), n=Z, h=X)).Rectangle(1,2).Face()
rect2 = WorkPlane(Axes((0,1,0), n=Z, h=X)).Rectangle(2,1).Face()
L = rect1 + rect2
geo = OCCGeometry(L, dim=2)
ngmsh = geo.GenerateMesh(maxh=0.5)
mesh = Mesh(ngmsh)
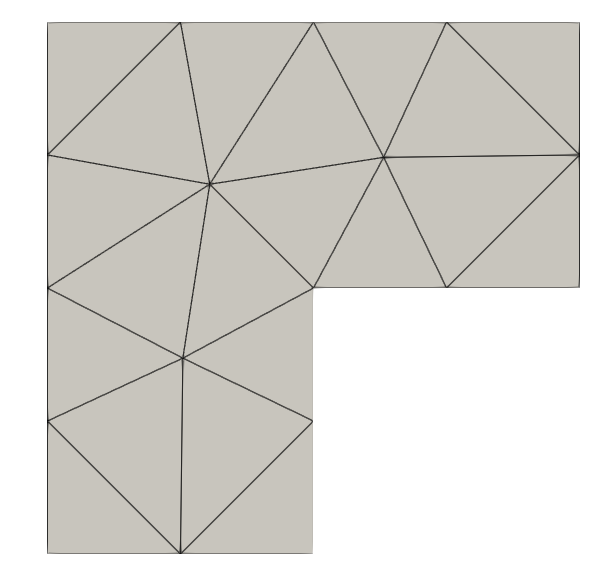
It is important to convert the initial Netgen mesh into a Firedrake mesh before constructing the AdaptiveMeshHierarchy. To call the constructor to the hierarchy, we must pass the initial mesh. Our initial mesh looks like this:
We will also initialize the AdaptiveTransferManager here:
amh = AdaptiveMeshHierarchy(mesh)
atm = AdaptiveTransferManager()
Poisson Problem¶
Now we can define a simple Poisson problem
Our approach strongly follows the similar problem in this lecture course. We define the function solve_poisson. The first lines correspond to finding a solution in the CG1 space. The right-hand side is set to be the constant function equal to 1. Since we want Dirichlet boundary conditions, we construct the DirichletBC object and apply it to the entire boundary:
def solve_poisson(mesh, params):
V = FunctionSpace(mesh, "CG", 1)
v = TestFunction(V)
u = TrialFunction(V)
uh = Function(V, name="solution")
bcs = [DirichletBC(V, 0, "on_boundary")]
f = Constant(1)
a = inner(grad(u), grad(v))*dx
L = inner(f, v)*dx
problem = LinearVariationalProblem(a, L, uh, bcs)
solver = LinearVariationalSolver(problem, solver_parameters=params)
solver.set_transfer_manager(atm)
solver.solve()
its = solver.snes.getLinearSolveIterations()
return uh, its
Note the code after the construction of the LinearVariationalProblem. To use the AdaptiveMeshHierarchy with the existing Firedrake solver, we have to set the AdaptiveTransferManager as the transfer manager of the multigrid solver.
Since we are using linear Lagrange elements, we will employ Jacobi as the multigrid relaxation, which we define with
solver_params = {
"mat_type": "matfree",
"ksp_type": "cg",
"pc_type": "mg",
"mg_levels": {
"ksp_type": "chebyshev",
"ksp_max_it": 1,
"pc_type": "jacobi",
},
"mg_coarse": {
"mat_type": "aij",
"pc_type": "lu",
},
}
Alternatively for high-order CG elements, it is recommended to use patch relaxation to achieve degree-independent multigrid convergence. For more information see Using patch relaxation for multigrid. The initial solution is shown below.

Adaptive Mesh Refinement¶
In this section we will discuss how to adaptively refine select elements and add the newly refined mesh into the AdaptiveMeshHierarchy.
For this problem, we will be using the Babuška-Rheinbolt a-posteriori estimate for an element:
where \(K\) is the element, \(h_K\) is the diameter of the element, \(\mathbf{n}\) is the outward-facing normal, and \(\left[[ \cdot \right]]\) is the jump operator. The a-posteriori estimator is computed using the solution at the current level \(h\). Integrating over the domain and using the fact that the components of the estimator are piecewise constant on each cell, we can transform the above estimator into the variational problem
Our approach will be to compute the estimator over all elements and selectively choose to refine only those that contribute most to the error. To compute the error estimator, we use the function below to solve the variational formulation of the error estimator. Since our estimator is a constant per element, we use a DG0 function space.
def estimate_error(mesh, uh):
Q = FunctionSpace(mesh, "DG", 0)
eta_sq = Function(Q)
p = TrialFunction(Q)
q = TestFunction(Q)
f = Constant(1)
residual = f + div(grad(uh))
# symbols for mesh quantities
h = CellDiameter(mesh)
n = FacetNormal(mesh)
vol = CellVolume(mesh)
# compute cellwise error estimator
a = inner(p, q / vol) * dx
L = (inner(residual**2, q * h**2) * dx
+ inner(jump(grad(uh), n)**2, avg(q * h)) * dS
)
sp = {"mat_type": "matfree", "ksp_type": "preonly", "pc_type": "jacobi"}
solve(a == L, eta_sq, solver_parameters=sp)
# compute eta from eta^2
eta = Function(Q).interpolate(sqrt(eta_sq))
# compute estimate for error in energy norm
with eta.dat.vec_ro as eta_:
error_est = eta_.norm()
return eta, error_est
The next step is to choose which elements to refine. For this we use a simplified variant of Dörfler marking [Dorfler96]:
The logic is to select an element \(K\) to refine if the estimator is greater than some factor \(\theta\) of the maximum error estimate of the mesh, where \(\theta\) ranges from 0 to 1. In our code we choose \(\theta=0.5\). With these helper functions complete, we can solve the system iteratively. In the max_iterations is the number of total levels we want to perform multigrid on. We will solve for 15 levels. At every level \(l\), we first compute the solution using multigrid up to level \(l\). We then use the current approximation of the solution to estimate the error across the mesh. Finally, we adaptively refine the mesh and repeat.
theta = 0.5
refinements = 15
est_errors = []
sqrt_dofs = []
mg_iterations = []
for level in range(refinements):
print(f"level {level}")
mesh = amh[-1]
uh, its = solve_poisson(mesh, solver_params)
VTKFile(f"output/adaptive_loop_{level}.pvd").write(uh)
(eta, error_est) = estimate_error(mesh, uh)
VTKFile(f"output/eta_{level}.pvd").write(eta)
est_errors.append(error_est)
sqrt_dofs.append(uh.function_space().dim() ** 0.5)
mg_iterations.append(its)
print(f" ||u - u_h|| <= C * {error_est}")
if len(est_errors) > 1:
rates = -numpy.diff(numpy.log(est_errors)) / numpy.diff(numpy.log(sqrt_dofs))
print(f" rate = {rates[-1]}")
if i != refinements - 1:
amh.adapt(eta, theta)
To perform Dörfler marking, refine the current mesh, and add the mesh to the AdaptiveMeshHierarchy, we use the amh.adapt(eta, theta) method. In this method the input is the recently computed error estimator eta and the Dörfler marking parameter theta. The method always performs this on the current fine mesh in the hierarchy. There is another method for adding a mesh to the hierarchy: amh.add_mesh(mesh). In this method, refinement on the mesh is performed externally by some custom procedure and the resulting mesh directly gets added to the hierarchy.
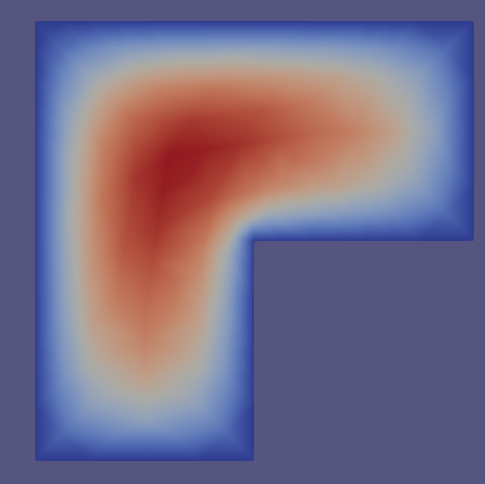
The meshes now refine according to the error estimator. The error estimators at levels 3,5, and 15 are shown below. Zooming into the vertex of the L-shape at level 15 shows the error indicator remains strongest there. Further refinements will focus on that area.
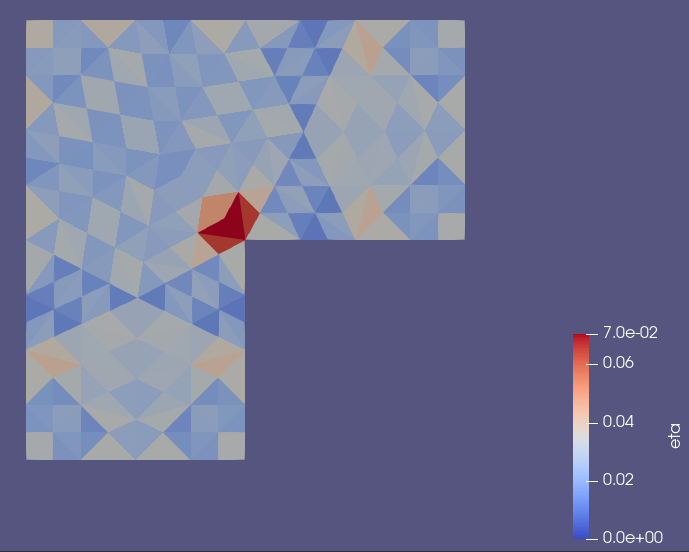
Level 3¶ |
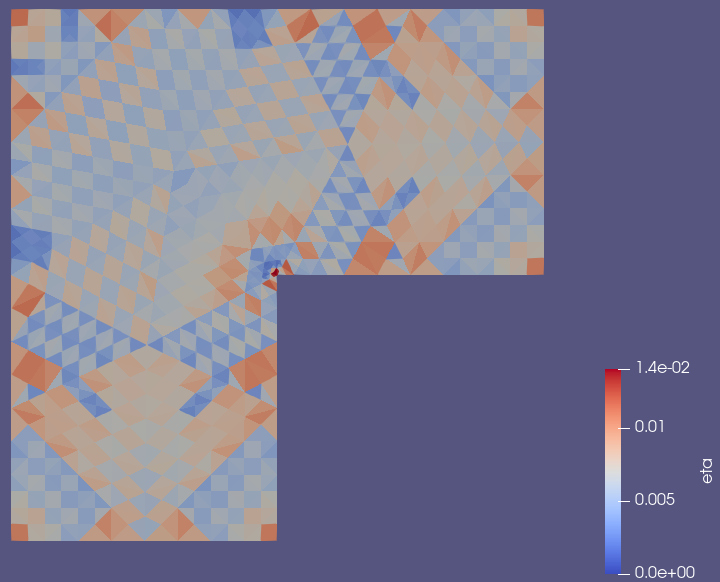
Level 6¶ |
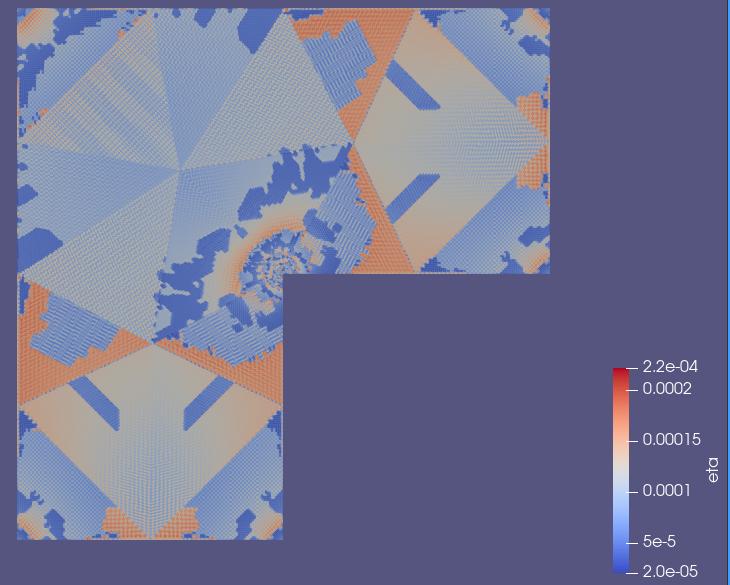
Level 15¶ |
The solutions at level 4 and 15 are shown below.
MG solution at level 4¶ |
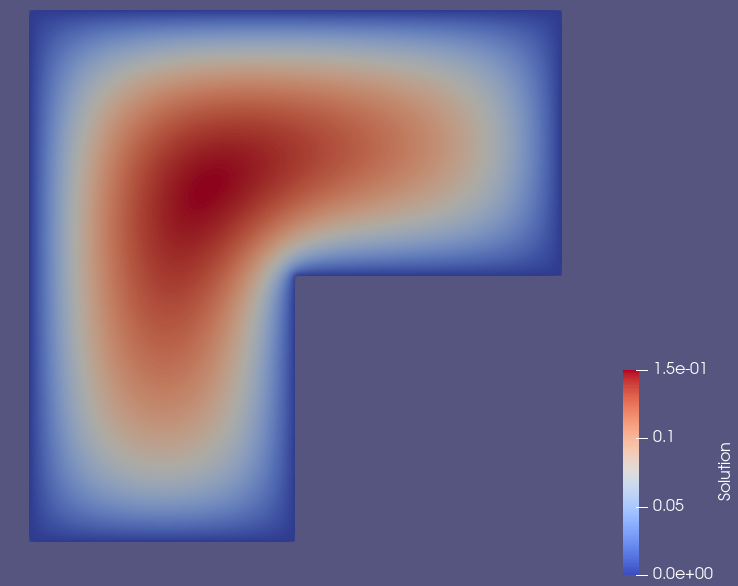
MG solution at level 15¶ |
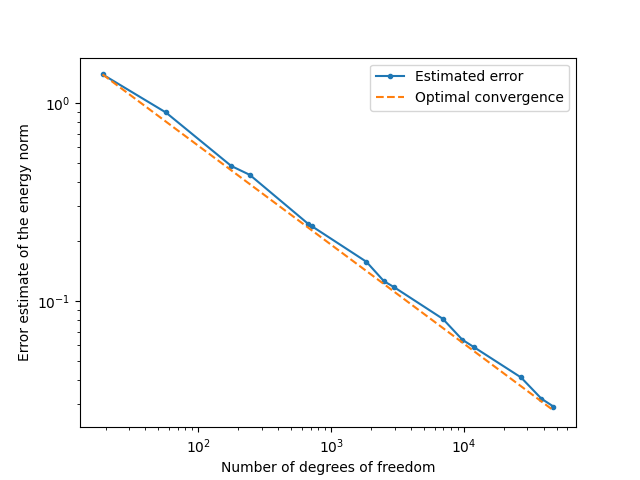
The convergence follows the expected optimal behavior:
from matplotlib import pyplot as plt
dofs = numpy.array(sqrt_dofs) ** 2
opt_errors = est_errors[0] * (sqrt_dofs[0] / numpy.array(sqrt_dofs))
plt.loglog(dofs, est_errors, '-o', markersize = 3, label="Estimated error")
plt.loglog(dofs, opt_errors, '--', markersize = 3, label="Optimal convergence")
plt.ylabel("Error estimate of the energy norm")
plt.xlabel("Number of degrees of freedom")
plt.legend()
plt.savefig("output/adaptive_convergence.png")
Moreover, the multigrid iteration count is robust to the level of refinement
print(" Level\t | Iterations")
print("---------------------")
for level, its in enumerate(mg_iterations):
print(f" {level}\t | {its}")
Level |
Iterations |
|---|---|
0 |
2 |
1 |
8 |
2 |
8 |
3 |
8 |
4 |
8 |
5 |
8 |
6 |
8 |
7 |
8 |
8 |
8 |
9 |
9 |
10 |
9 |
11 |
9 |
12 |
9 |
13 |
9 |
14 |
9 |
A runnable python version of this demo can be found here.
References
Willy Dörfler. A convergent adaptive algorithm for poisson’s equation. SIAM Journal on Numerical Analysis, 33(3):1106–1124, 1996.